DragonFly Research Project
To meet requirements set forth by the Office of Naval Research in conjuction with Lincoln Laboratory and Draper Laboratory, the Dragonfly UAV and Lilypad Pod system was developed to provide docking and recharging capabilities at sea with a surveillance UAV that can relay data to a remote operator. A proof of concept system was designed and built to test driving design concepts including flipping when inverted, docking with the pod, and autonomous surface navigation and docking.
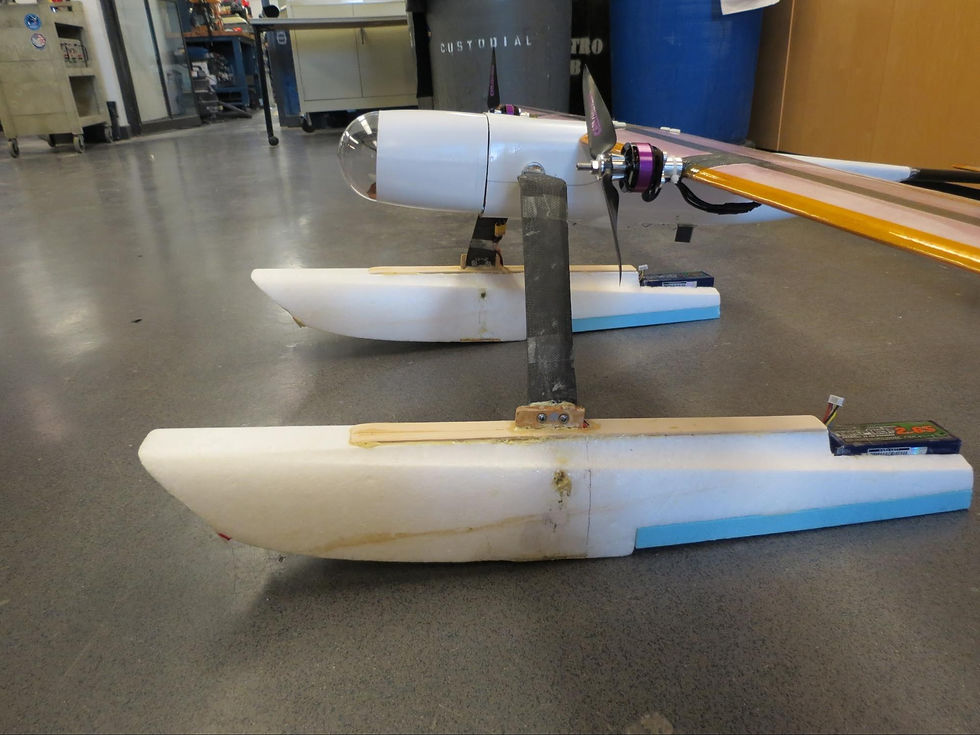
A driving design consideration was the requirement that the UAV be able to recover if overturned in water. To accomplish this, the pontoons rotate about the UAV and flip the UAV over. A worm gear in the fuselage rotates the pontoons, and the rotation can be used not just to flip the UAV over but to also increase the angle of attack during take off.
Another unique feature of the UAV is its ability to recharge at sea through the pod system. The UAV uses GPS data to begin its approach to the pod, and then switches to a vision tracking system using the front camera for the final approach. To connect, the UAV autonomously drives over the pod and physically connects to the pod via magnets. The UAV then recharges from the pod’s batteries.
The UAV is made up of three major fuselage sections: a fully-waterproofed electronics partition, the gear box which houses the flip mechanism’s worm gear, and a water-tolerant rear section. Carbon rods run through the length of the fuselage, and the wings and empennage attach to these rods. The UAV’s straight wings, with a wingspan of 1.83 meters, have flaperons that provide roll and glide-slope control. The empennage’s horizontal stabilizer has an elevator, and the vertical stabilizer includes a rudder for improved yaw control.
The UAV was developed to perform its mission autonomously. The system features autonomous navigation and flight to mission waypoints, landing and surface operations. The surface operations software is able to navigate to the pod’s GPS coordinates, switch to and operate under a visual detection mode, and successfully dock autonomously with the pod system. The software utilizes a state machine to transition between different operational modes and a Lightweight Communications and Marshaling (LCM) for communication between processes. A Raspberry Pi 2 handles the UAV’s autonomous tasks.
To prove this UAV concept, flip, docking, and flight tests were performed. The current Mark 2 design has not been able to flip, but a prior Mark 1 vehicle has been able to successfully flip out of an inverted position. The dynamics of the flip have thus been demonstrated as feasible. An outdoor docking test was performed where the UAV was successfully able to autonomously drive over the dock and connect to the pod system. Additionally, a manual flight test was performed, showing the UAV can successfully take-off, cruise, and land in the water. This proof of concept UAV has demonstrated autonomous visual surface navigation, docking, and flight capabilities, and the flip dynamics have been proven.